一、项目背景
在传统的技术模式下,水库勘探工作主要应用CAD来完成,由于CAD是在二维平面上制图,其在信息表达方面存在局限性,设计过程繁琐,不直观,因此在实际应用过程中有一定的缺陷,而三维数据模型具有信息丰富、操作直观、建模效率高等方面的优势。
二、项目方案本次任务,我们选用了大疆M300RTK+GS-260X激光雷达扫描系统+GNSS变形监测系统的组合,GS-260X支持3次回波,可有效穿透植被,获取地面点数据,为后期点云数据处理提供了很大的便利;由于本次测区位处库区,地形起伏较大,所以选用WPM(航迹大师)为本次航飞设计规划航线任务,WPM航线规划会在激光雷达长距离匀速直线飞行航线中自动添加中途校准航线,避免了因惯导漂移而导致绝对精度下降的问题。 三、设备选择通过对项目的充分了解,决定采用际上导航GS-260X激光雷达扫描系统。GS-260X拥有最大300m的测程,产品重量仅0.99kg,最大化提高作业时长,最大激光点频1920000pts/s,三次回波,穿透性强,同时深度集成相机,点云、影像同步采集。GS-260X广泛应用于地形测绘、水利应用、电力通道巡检、林业调查、数字城市等行业,让大范围数据采集得心应手。

产品实物图
GS-260X+M300
系统优势:模块化:安装简易、迅速作业、适配市面主流无人机。免基站作业:无需架设实体基站,数据精度优于1:1000大比例尺。全自主:一体化供电、一键起飞,数据自动采集,一键数据下载,单人便可完成作业。直接真彩:无需空中三角加密,即可实现激光雷达点云一键真彩色。具体参数:(1)系统指标点云精度:10cm@150m点云密度:42pts/m²@150m@10m/s设备重量:0.99Kg(含相机)系统功耗:20W存储空间 :
雷达:机内闪存 64G+128G SD卡
相机:128G SD卡电源范围:12-24V外观尺寸:14.4cm*10.9cm*12cm工作温度:-20℃-55℃搭载平台:机载、车载(2)POS性能指标型号:gSpin310数据更新频率:200HzGNSS信号类型:GPS L1/L2;GLO L1/L2;GAL E1/E5b;BDS B1/B2a/B3定位精度:水平0.02m,高程0.03m俯仰角精度:0.005°横滚角精度:0.005°航向角精度:0.017°(3)激光器性能指标测程:最大测程300m测距精度:±2cm线数:32线水平视场角:360°垂直视场角:40.3°点频:192万点/秒(三次回波)四、外业操作在确定试用设备后,需要确定激光雷达的参数,在参数规划过程中要综合考虑各方面因素,包括影像的航向重叠、旁向重叠、地面分辨率、激光雷达扫描频率、旁向重叠率、线扫描速度、点密度、无人机飞行速度等。1、航线规划

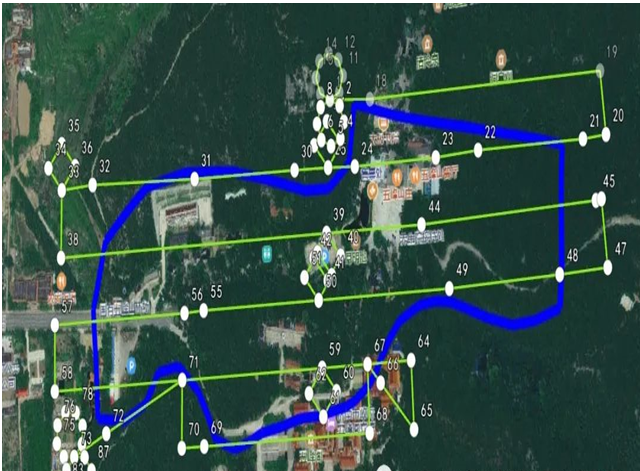
航线的规划工作是决定飞行扫描测量和成像任务完成质量的关键因素。航线设计需要综合考虑地形地貌、续航时间、测区面积等因素,合理地划分架次、设置重叠度。还需要外业踏勘选取起飞点,适合在视野开阔、信号干扰少地区选取;我们采用定制版的WPM软件,输入航高和重叠率,自动规划出仿地航线,方便快捷,并且可以很好的保证飞行安全,避免因地形起伏导致的炸机事故,外业效率和安全得到有效提高。 2、飞行作业 雷达静止3min后,上传执行航线即可自动完成数据外业数据采集。3、数据采集

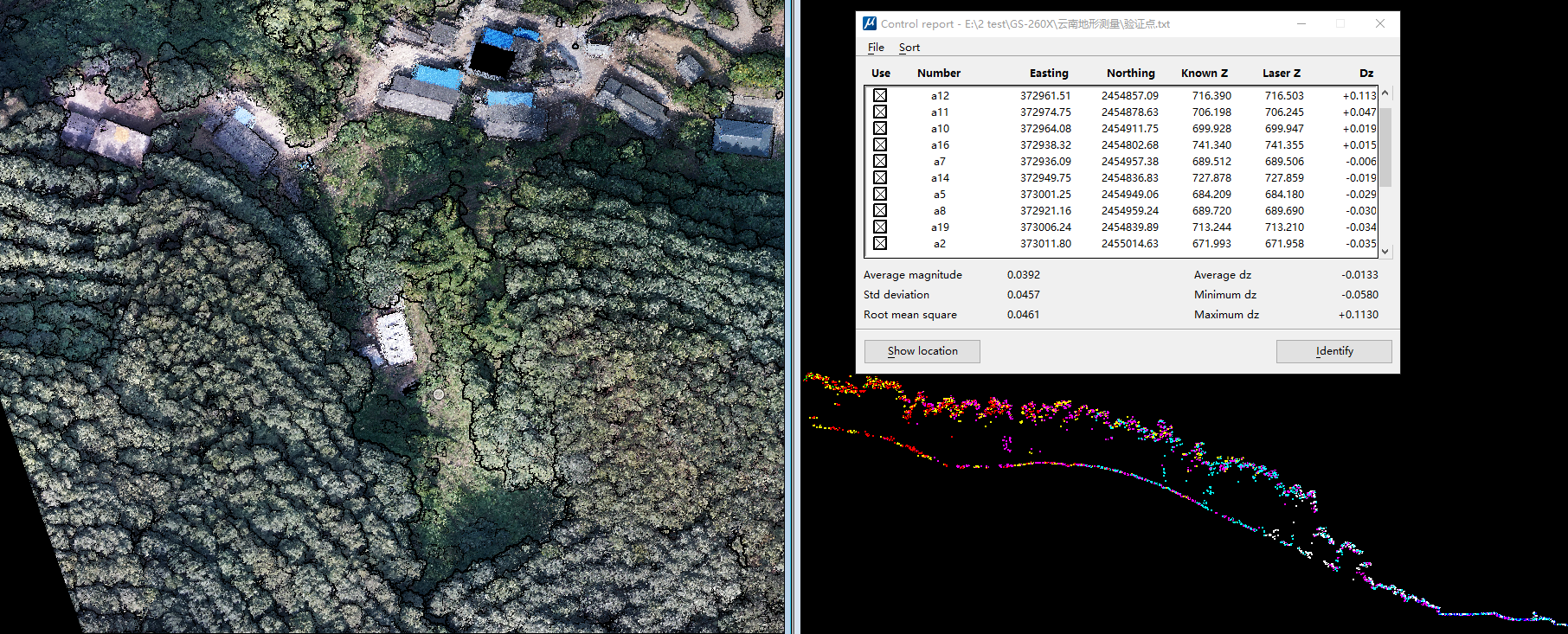
通过遥控器导入规划航线,执行后雷达自动数据采集的方式,对水利工程进行飞行扫描测量和成像,获得高精度点云和影像数据。 4、数据处理依次导入基站、流动站、雷达原始文件以及照片存储文件夹,gAirHawk软件自动读取设备参数,轨迹及彩色点云同步一键解算。▲导入原始数据进行一键解算
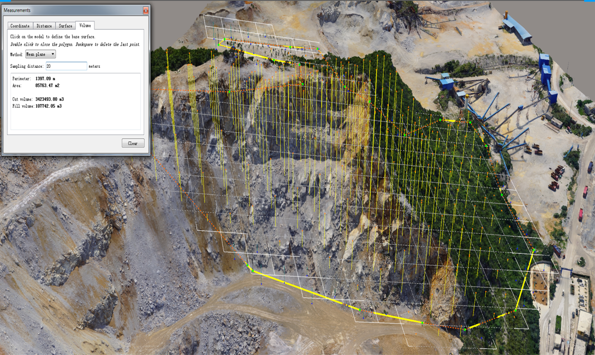
数据成果五、项目总结技术优势:针对水利水电常见的作业环境和激光点云数据自身的特点,机载激光雷达技术结合传统摄影测量技术在高密度植被覆盖区域的地形测绘应用情况,重点介绍了机载激光雷达点云数据的分类方法,从数据获取、预处理,点云滤波分类、空三加密到成图的每一个环节,实现高密度植被覆盖区域地表信息的提取和测绘成图。在地区复杂多植被测量方面机载激光扫描系统由很大优势,未来水利水电工程测绘领域具有广阔的应用前景。