项目背景
地形测绘是获取位置空间信息的重要手段。与传统测量相比较,机载激光雷达能够大幅度提高工作效率;多回波技术穿透植被可节省人力,也减少传统测量中人为因素带来的误差,在地形测量中应用前景广阔。
测区概况

该项目位于广东省揭阳市某地区内,测区为山地地形,地势起伏较大,高低最大落差300米,周边植被茂密,且有数处较密集的居民聚集地。该项目工期短,测区面积大,精度要求高。
项目需求及难点
项目需求:
测区航线的规划;
坐标系统:CGCS2000 成果提交:DEM、DOM、DLG等。
项目难点:
地形复杂:测区植被茂密,传统测量方式无法高效获取测区准确的高程数据;
任务时间紧:需求3天时间内完成测区的数据采集及成果数据输出任务;
转场难度大:测区内路况复杂,传统测绘设备转场耗时费力;
精度要求:满足1:500地形测绘要求。
作业方案

通过对项目的充分了解,决定采用际上导航gAirHawk GS-1350N长测程激光雷达系统执行本次任务;gAirHawk GS-1350N是际上导航自主研发的长测程机载雷达系统,系统集成光学相机,同时能够获取影像数据。
GS-1350N参数指标:
|
系统指标 |
|
|
点云精度 |
10cm@300m |
|
点云密度 |
40pts/m²@400m@10m/s |
|
设备重量 |
3.2Kg |
|
系统功耗 |
70W |
|
存储空间 |
机内闪存64G+128G SD卡 |
|
电源范围 |
24V |
|
外观尺寸 |
24.5cm*14cm*12.5cm |
|
工作温度 |
-20℃-55℃ |
|
搭载平台 |
机载 |
|
POS性能指标 |
|
|
型号 |
gSpin410 |
|
数据更新频率 |
200Hz |
|
GNSS信号类型 |
GPS L1/L2;GLO L1/L2;GAL E1/E5b;BDS B1/B2a/B3 |
|
定位精度 |
水平0.02m,高程0.03m |
|
俯仰角精度 |
0.003° |
|
横滚角精度 |
0.003° |
|
航向角精度 |
0.010° |
|
激光器性能指标 |
|
|
测程 |
1500m@50%反射率,最大测程1500m |
|
测距精度 |
重复精度±0.5cm |
|
线数 |
单线 |
|
视场角 |
75° |
|
回波数 |
七次回波 |
|
脉冲频率 |
50KHz-2000KHz |
|
扫描频率 |
600线/秒 |
|
角度分辨率 |
0.001° |
|
相机指标 |
|
|
像素 |
2600万/6100万 |
|
视场角 |
83°/63° |
|
拍摄模式 |
等时拍摄/等距拍摄 |
CW-25E 固定翼无人机系统
|
硬件 |
|
|
机身长度 |
2.1m |
|
翼展 |
4.35m |
|
最大起飞重量 |
31kg |
|
测控距离 |
50km |
|
DGPS |
RTK/PPK |
|
携带箱尺寸 |
1640×640×630mm |
|
有效负载 |
|
|
任务载荷 |
3-6kg |
|
飞行 |
|
|
续航时间 |
120-240min |
|
经济巡航速度 |
72km/h |
|
抗风能力 |
7级(13.9-17.1 m/s) |
|
防雨雪能力 |
小雨小雪(降雨量≤10mm/24h) |
|
起降方式 |
垂直起降 |
|
实用升限 |
6000m |
|
最高起飞海拔 |
4000m |
|
垂直方向定位精度 |
3cm |
| 水平方向定位精度 | 1cm+1ppm |
| 软件 | |
| 地面站软件 | 纵横飞图(航测版)、纵横鹰图(监控版) |
软件介绍:
|
处理软件 |
轨迹解算软件 |
※1、gAirHawk点云预处理软件拥有完全自主知识产权; ※2、支持纯北斗信号数据解算; ※3、支持GNSS选星功能,提高定位精度,优化计算结果; ※4、支持PPK模式解算(必须使用断网环境验证,确保数据安全); 5、支持目前国际上先进的GNSS模糊度单历元解算算法; 6、支持如NovAtel,Trimble等多品牌多厂家GNSS数据格式的直接读取,包括Rinex格式和RTCM格式,不需要经过转换后再次读取(使用甲方提供基站验证); 7、GNSS解算支持位置、速度输出; ※8、轨迹输出支持自定义格式; ※9、GNSS/INS组合支持正反正三向往返滤波、平滑滤波功能,以支持无需8字或者加减速校正,以及免除飞机落地后静置过程; 10、GNSS/INS组合支持里程计辅助计算功能,即使在GNSS失锁期间,也可连续高精度定位; ※11、GNSS/INS组合卡尔曼滤波器可以设置动态更新和量测更新时间; ※12、软件支持用户互动查询功能,具备从属性查图形数据和从图形查属性数据的双向查询功能; ※13、软件具备历元星空图、原始数据、定位测姿结果等信息显示功能,以便用户分析和优化定位结果; ※14、系统支持常见的坐标系统,支持用户自定义坐标系统,并提供不同坐标系之间的转换; ※15、软件支持永久免费升级,并且一套软件授权可供多个计算机同时或非同时使用,一套软件授权可以支持多台设备数据。 |
|
点云计算软件 |
1、支持多型号激光扫描系统,包括不同精度、不同测程的激光扫描系统; 2、软件既可以在野外对激光器进行参数配置,也可以对激光点云的计算参数进行配置; 3、软件既可以在野外数据采集时实时计算点云,也可以通过采集的原始激光数据和事后算得的POS数据进行事后计算点云; 4、可按文件输出点云数据和按航带划分输出点云数据,航带输出时自定义输出航带时间段点云数据; 5、可选择输出格式,可输出通用las格式和txt文本格式点云数据; ※6、输出彩色点云,若设备集成相机,且填写好相机相关的文件,勾选此项解算时可免正射空三的输出彩色点云; 7、具有计算参数和输入参数,可进行坐标转换功能,可将输出点云直接转化到当地坐标; ※8、具有航向角改正功能,可在点云计算软件中对航向错位角进行调整; ※9、软件支持一键解算功能,使用便捷。 |
注:带※号者为际上导航专有的国内唯一产品
外业实施
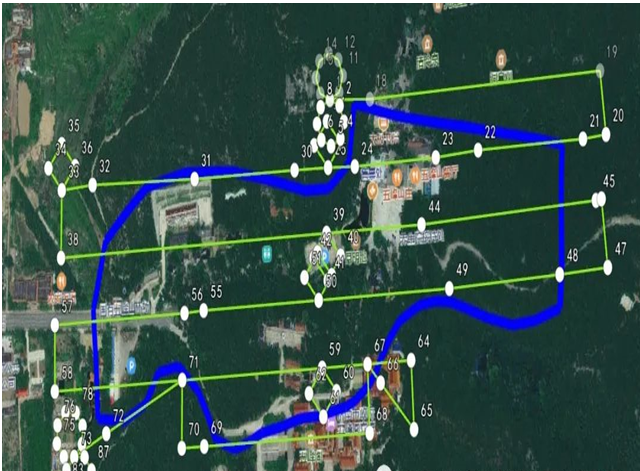
1、航线规划
通过系统定制的飞行规划软件,选择对应的产品型号,规划出满足此款雷达重叠率的航线,同时规划仿地航线,设置相对航高和飞行速度;航线为协调转弯,最大程度的保障雷达精度和安全。保证外业飞行可简单、高效的直接上传执行测区任务。
▲航线规划
2、飞行作业
地面架设基站采集静态GNSS数据用于轨迹后差分处理。
3、数据采集
静止五分钟后,一键执行规划航线,同步采集点云及影像数据。

数据处理
1、数据预处理
依次导入基站、流动站、雷达原始文件以及照片存储文件夹,gAirHawk软件自动读取设备参数,轨迹及彩色点云同步一键解算。
▲导入原始数据进行一键解算
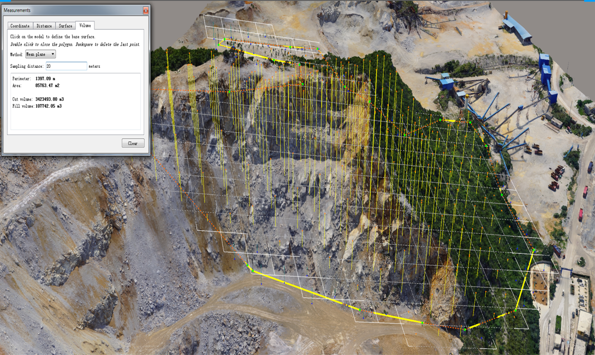
2、数据后处理

▲正射影像DOM制作

▲正射影像DLG范围详图
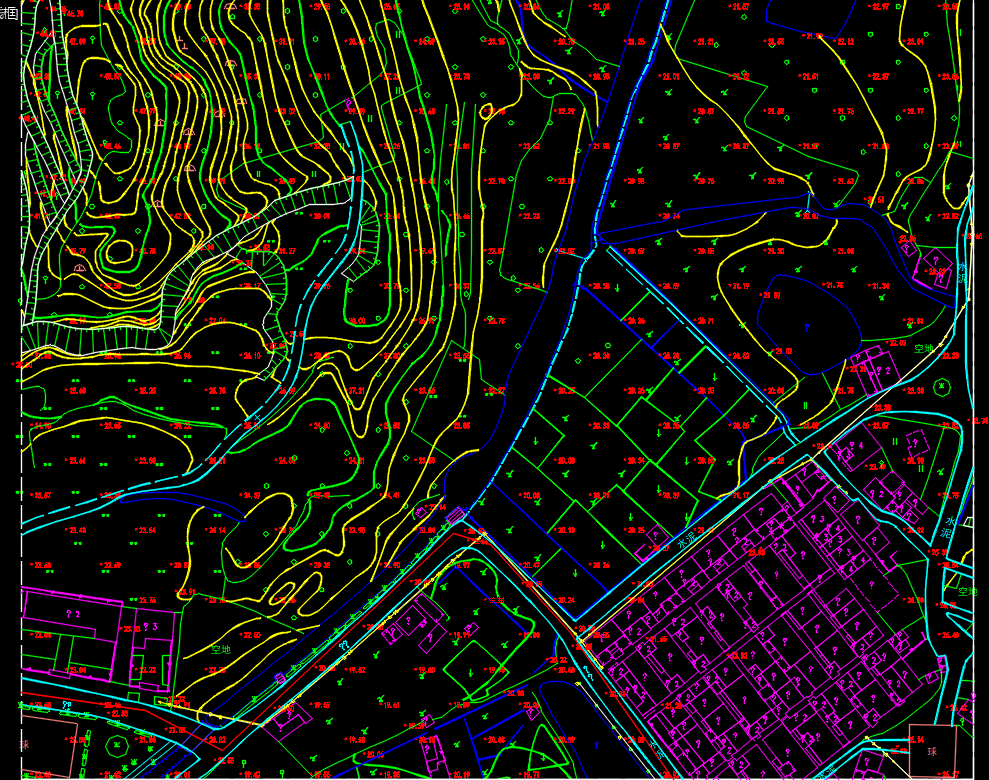
▲数字线画图DLG制作
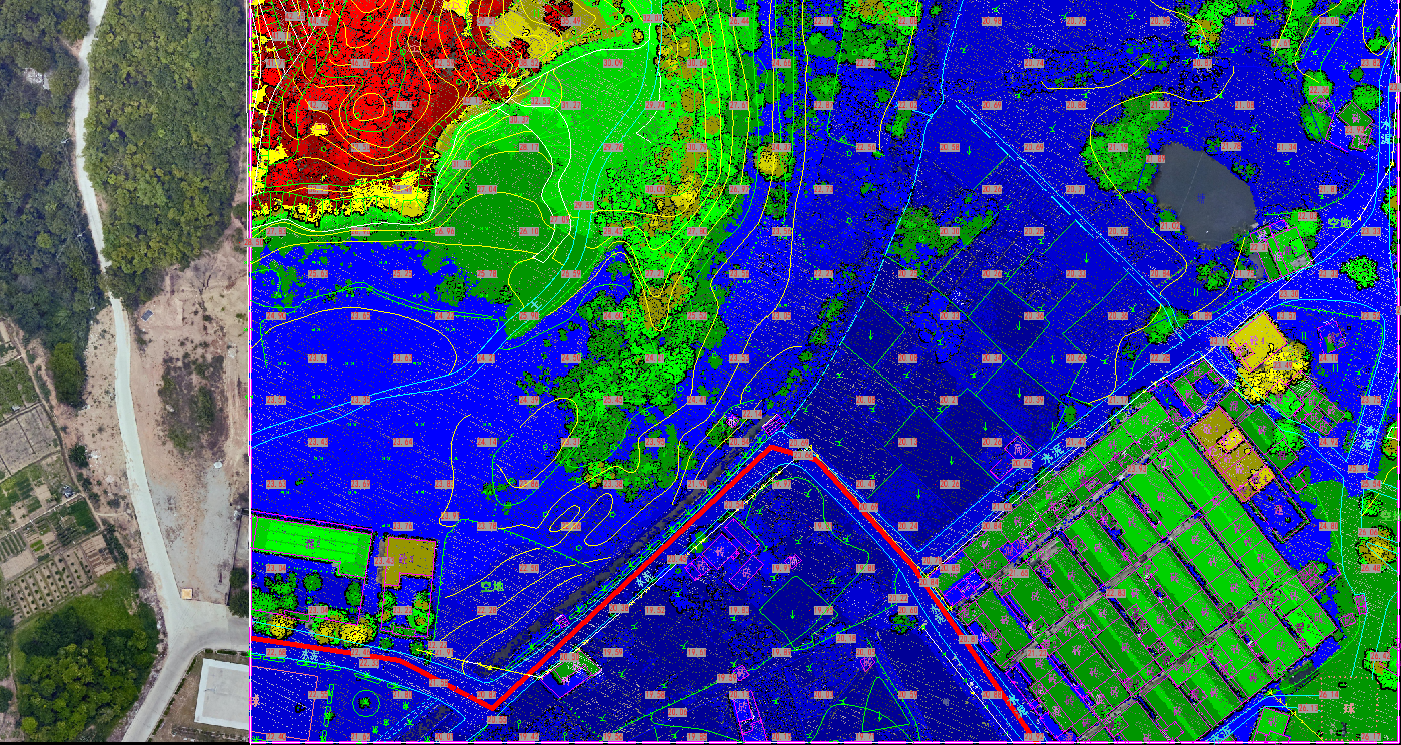
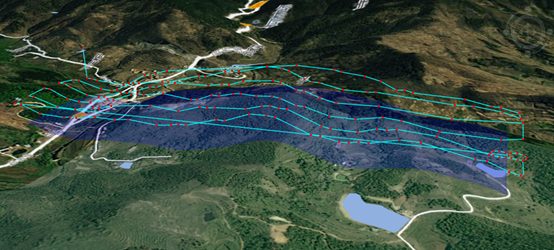
▲点云叠加正射(DOM)叠加DLG
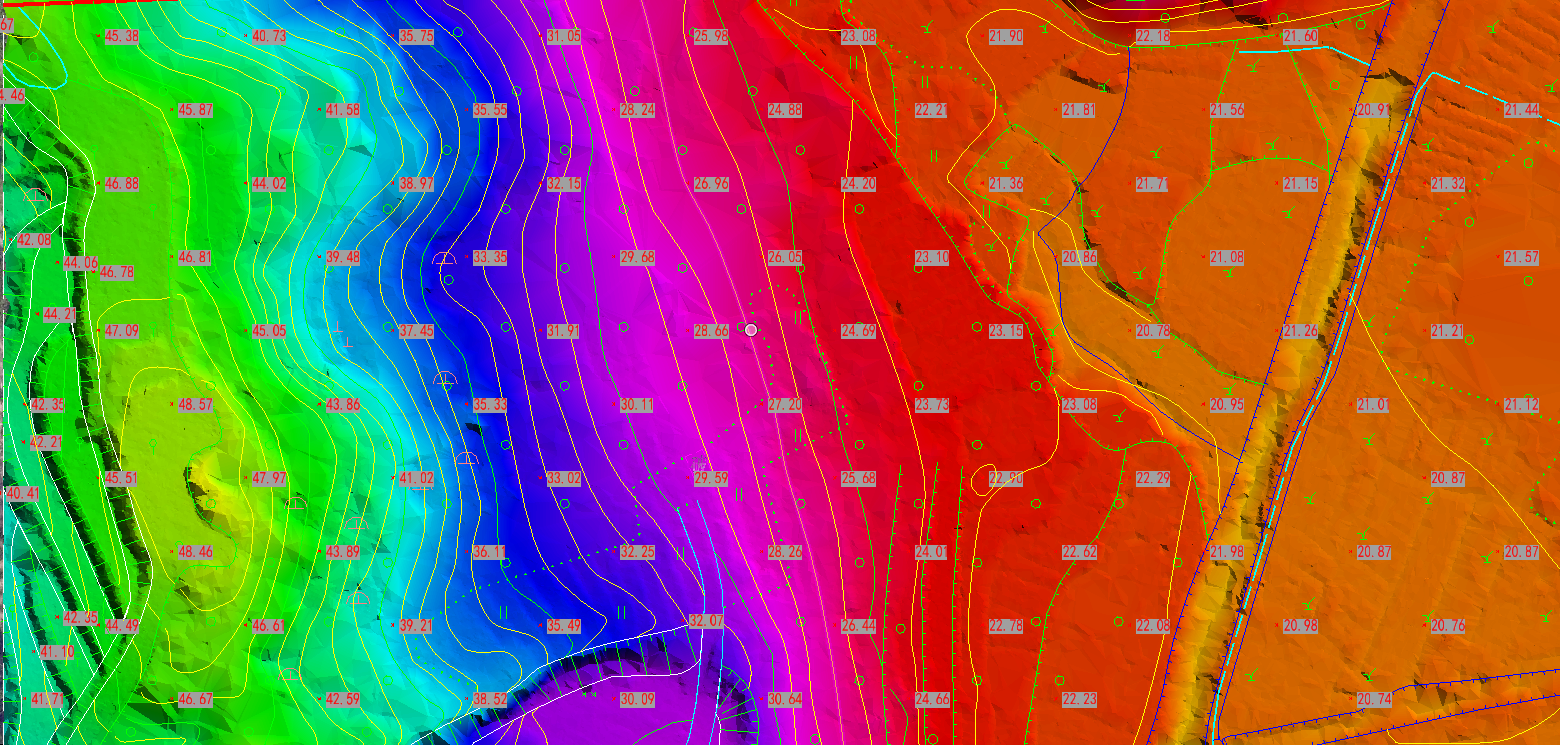
▲DEM叠加DLG

▲DOM叠加DLG
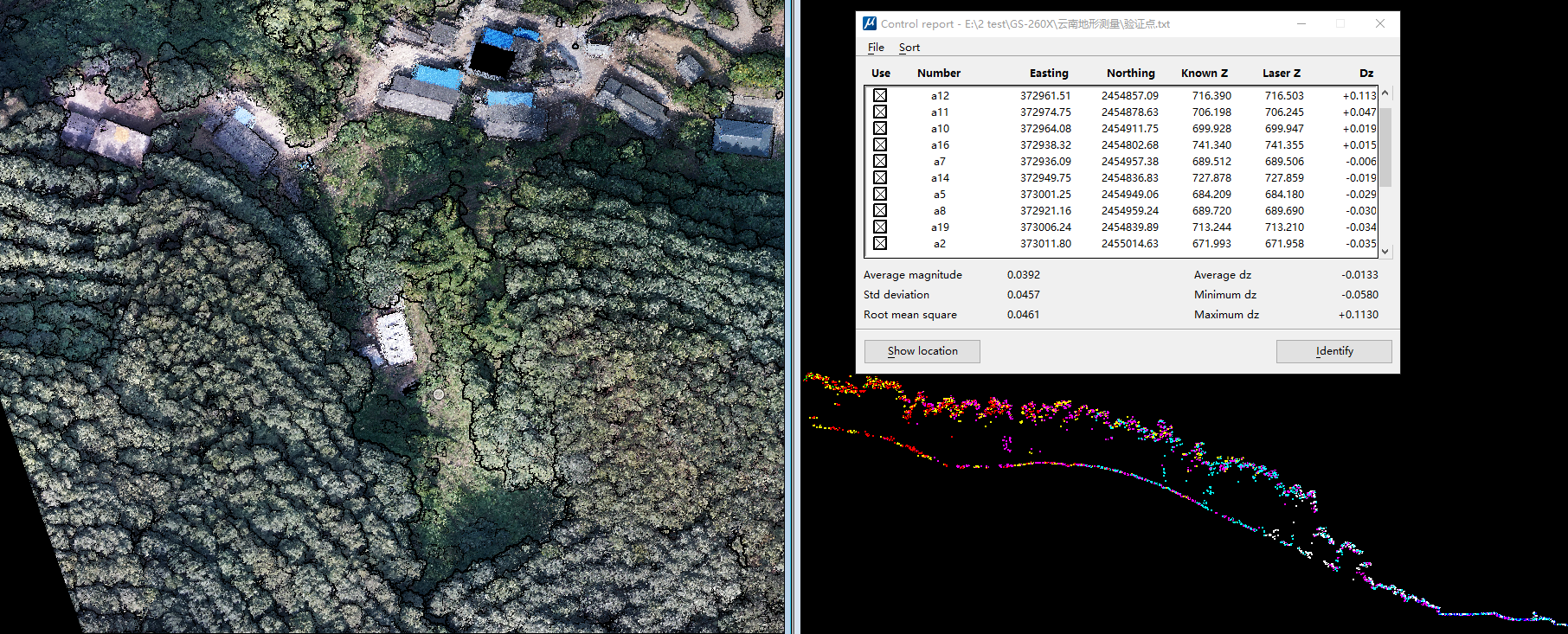
精度检测

作业结束后,在测区内人工测量了30个高程检核点,用来检核点云成果的精度;将检核点的坐标导入TerraSolid软件,生成点云高程精度报告,精度为0.046m,满足项目要求,如下图所示:
项目总结
通过利用gAirHawk GS-1350N长测程激光雷达系统实施本次地形项目,机载激光雷达与其他传统手段相比的优势有以下几点:
■作业便捷、灵活,适用于小范围不规则测区的测绘;
■速度快——外业勘查+原始数据采集0.5-1h;点云+影像数据处理2-3h;地形图绘制6-8h。项目实施至成果产出整体时间约10h;
■成本低——项目实施技术技术人员2人,外业时间一天,大大减少了人力物力投入成本;
■质量高——获取多元化数据,细节丰富,点云精度高,成图质量好。