◆ ECEF坐标系导航计算
惯性导航计算在地球固连坐标系(ECEF)中进行,便于与GNSS进行紧密层次的组合。
◆ INS高阶误差模型
误差模型可以配置为随机常数、随机游走以及一阶马尔可夫过程。
◆ 多格式数据直接输入
IMU数据支持增量数据和速率数据输入,兼容Novate IE 软件imr格式,并且可转换为ASCII格式方便查看。
◆ 事后多向滤波
软件支持正反向往返滤波、平滑滤波以及里程计和全站仪辅助计算,可以有效提高精度,这样即使在GNSS失锁期间,也可连续高精度定位。
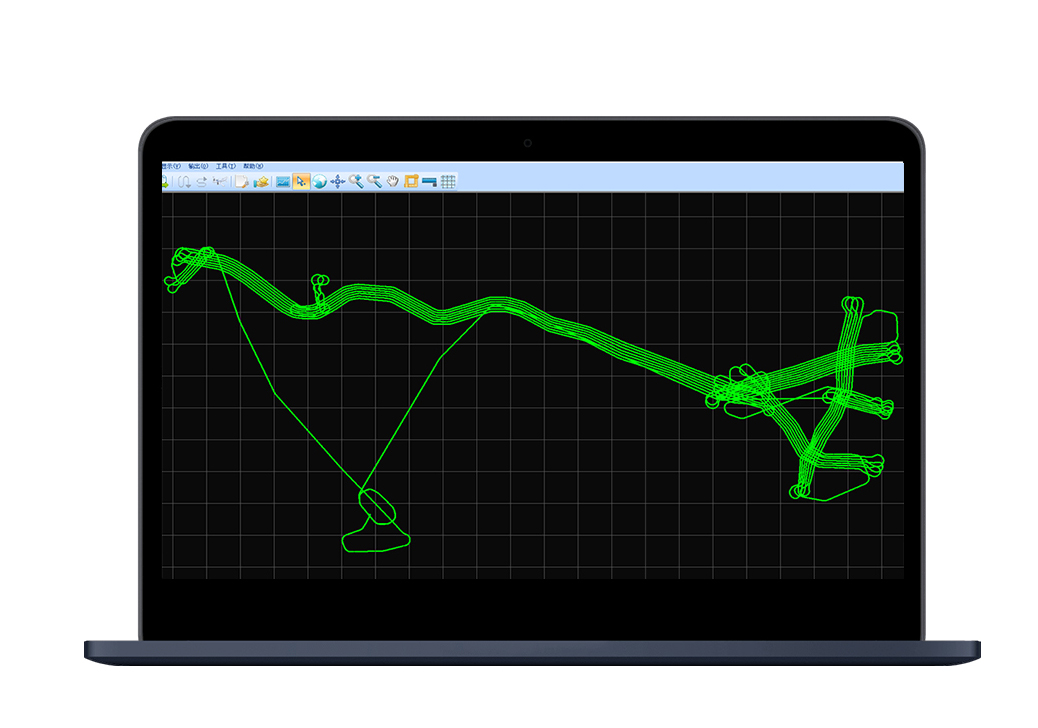
◆ 友好图形界面
Shuttle软件提供了友好的用户界面,用户可以对定位结果图形进行各种放大、缩小、漫游和测距等图形操作。
◆ 用户自定义输出
用户可以根据自己的具体需求定义输出的内容、单位和格式,并保存至输出配置文件中,方便下次直接使用。
◆ 坐标系统管理
系统支持常见的坐标系统,支持用户自定义坐标系统,并提供不同坐标系之间的转换。

机载激光雷达
船载激光雷达

车载激光雷达

手持激光雷达




获取产品信息/咨询服务与方案报价