一、项目背景
铁路、高速公路的快速发展,极大提高了我国铁路、公路网的整体技术水平,优化了交通运输结构,有力地促进了经济发展和社会进步。但随着交通量的快速增长,越来越多的铁/高速公路的服务水平和通行能力已不能满足日益增长的交通量的需求,因此加快早期建成的铁路/高速公路扩容改造,加大国省干线铁路/公路改建力度,已成为当前铁路/公路交通建设的主要任务之一。
二、项目概况
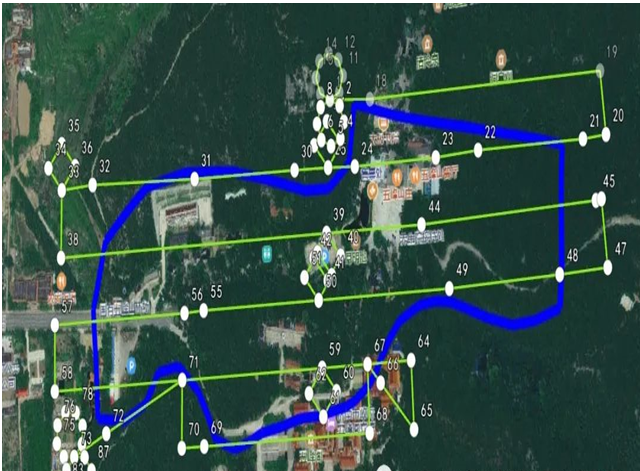
本项目隶属国道某公路建设项目,项目地理位置图如下:

项目使用车载激光雷达系统,成功完成现有道路改扩建测绘数据采集,并快速生成相应成果数据, 满足了公路改扩建详测与施工图设计精度要求。
三、设备概况
GS-260X多平台激光雷达系统,集成长距离、高精度激光传感器和惯性导航系统,满足不同环境下的测绘任务,内置高分辨数字相机,提供正射影像与三维点云的完美结合。设备可选直升机平台、无人机平台、车载平台、船载平台,实现空中与陆地数据的无缝对接,在保证精度的同时,大大提升了外业作业的效率。系统可广泛应用于数字城管、数字城市、地形地理测绘、公路勘察设计、应急救灾等领域。

图 2 GS-260X多平台激光雷达系统
1、系统指标
点云精度:10cm@150m
点云密度:42pts/m²@100m@10m/s
设备重量:0.99Kg(含相机)
系统功耗:20W
存储空间: 雷达机内闪存: 64G+128G SD卡 相机:128G SD卡
电源范围:12-24V
外观尺寸:4.4cm*10.9cm*12cm
工作温度:-20℃-55℃
搭载平台:机载、车载
2、POS性能指标
型号:gSpin310
数据更新频率:200Hz
GNSS信号类型:GPS L1/L2;GLO L1/L2;GAL E1/E5b;BDS B1/B2a/B3
定位精度:水平0.02m,高程0.03m
俯仰角精度:0.005°
横滚角精度:0.005°
航向角精度:0.017°
3、激光器性能指标
测程:最大测程300m
测距精度:±2cm
线数:32线
水平视场角:360°
垂直视场角:40.3°
点频:192万点/秒(三次回波)
四、技术路线
(一)技术路线

(二)采集流程

(三)数据处理
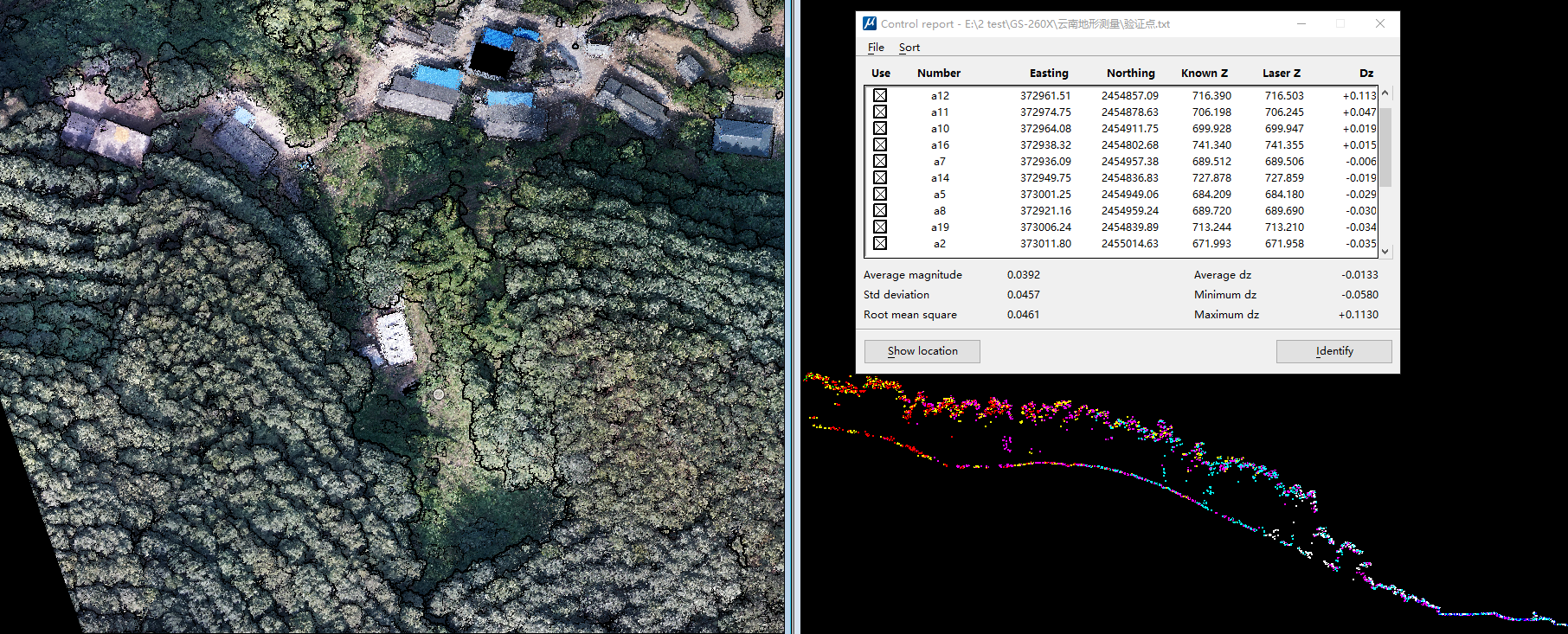
数据预处理主要包括POS解算、激光点云预处理。可按时间输出载体的位置、速度、姿态信息; 再利用高精度的POS结果,给点云数据提供直接的地理参考。

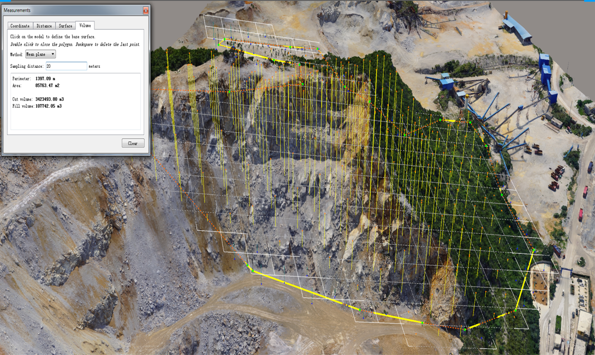
横断面提取是指根据地面点数据按桩号生成断面,断面上带有对应点的高程信息。

图 13 横断面数据
五、技术优势
在本项目中,利用际上GS-260X多平台激光雷达系统车载模式进行公路沿线测绘数据采集,极大地提升了数据采集效率,项目实际作业里程约40公里(双向80公里),整体实施工期为3天。在快速作业、短时间内获取海量点云的同时,保证了最终数据成果的精度,完全满足改扩建测绘成果的精度要求。本项目的成功实施,证明了利用激光雷达进行公路勘察测绘是一种高效率、高精度的方法,相比于传统测量方式,基于激光雷达系统的道路勘测技术有着不可比拟的优势,其安全高效、快速便捷的作业方式具有很大的应用前景!